
 español
español









Motor sincrónico magnético permanente
La principal diferencia entre un motor síncrono de imán permanente (PMSM) y un motor de inducción está en el rotor estudios 1 Mostrar que el pmsm tiene un eficiencia de aproximadamente 2% más que un altamente eficiente (IE3) Motor eléctrico de inducción, siempre que el estator tenga el mismo diseño, y el mismo unidad de frecuencia variable Se utiliza para Control. En este caso, los motores eléctricos sincrónicos del imán permanente en comparación con otros motores eléctricos tienen el mejor rendimiento: Potencia / Volumen, Torque / inercia, etc.
Un motor síncrono de imán permanente, como cualquier Motor eléctrico giratorio, consiste en un rotor y un estator. El estator es la parte fija El rotor es la parte giratoria
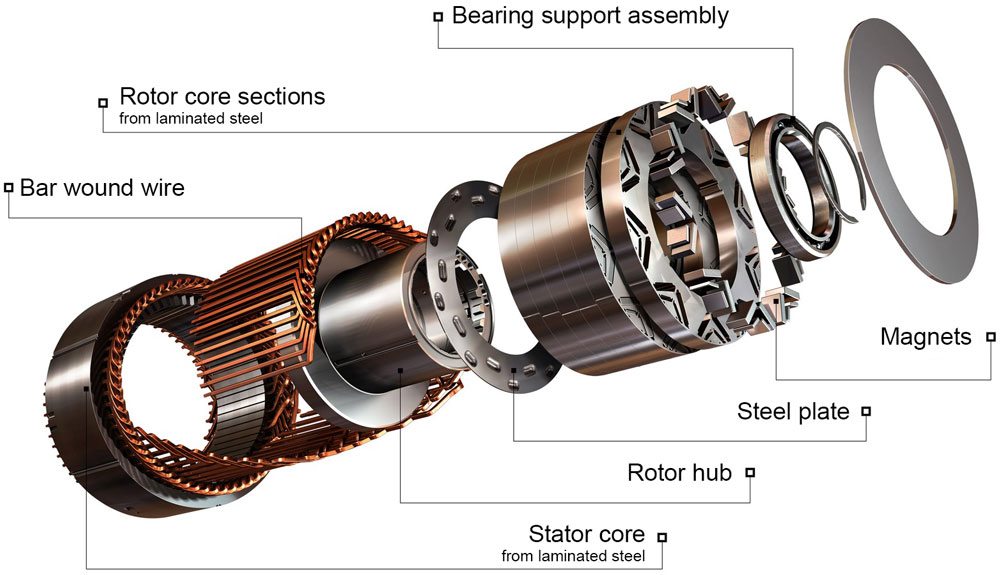
Típicamente, el rotor se encuentra dentro del estator del motor eléctrico, también hay estructuras con un rotor externo - Dentro de la electricidad Motores.
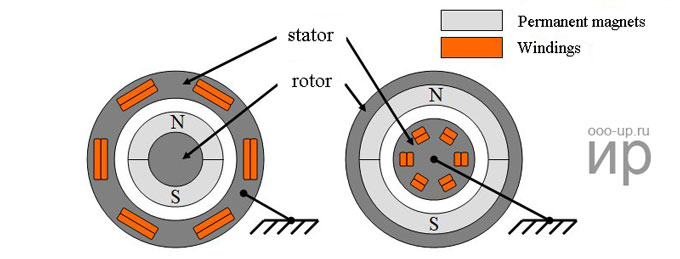
La rotorconsiste en imanes permanentes Los materiales con alta fuerza coercitiva se utilizan como imanes permanentes.
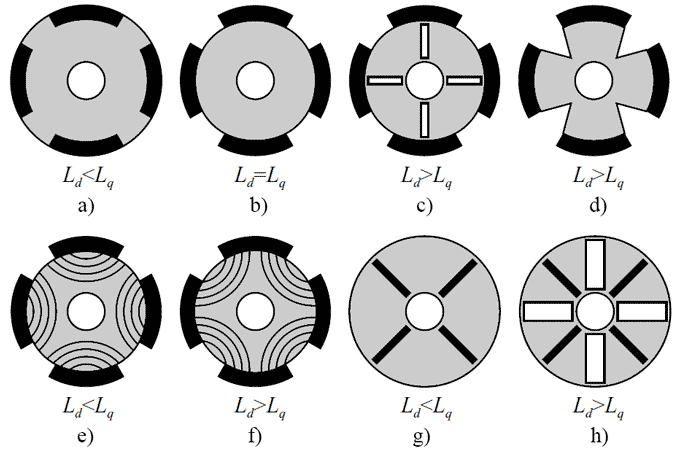
Un motor eléctrico con no saliente El rotor de polos tiene una igualdad directa y las inducciones de la cuadratura l D = l q , mientras que Para un motor eléctrico con el rotor de polos salientes, la inductancia de la cuadratura no es igual a la lista directa q ≠ l D .
La estatorconsiste en un marco exterior y un núcleo con devanados. El diseño más común con dos- y trifásico Bobinado.
repartidoLlame a un sinuoso, en el que el número de Slots por polo y fase q = 2, 3, ...., k.
concentrado Llamado así un devanado, en el que el número de Slots por polo y fase q = 1. En este caso, las ranuras están espaciadas uniformemente alrededor de la circunferencia del estator. Las dos bobinas que forman el bobinado se pueden conectar tanto en serie como en paralelo. La principal desventaja de tales devanados es la imposibilidad de influir en la forma de la curva EMF. [2] .
La forma de la curva EMF en el conductor está determinada por la curva de distribución de la inducción magnética en la brecha alrededor del estator circunferencia.
Se sabe que la inducción magnética en la brecha debajo del polo saliente del rotor tiene una forma trapezoidal. El EMF inducido en el conductor tiene el mismo forma. Si Es necesario crear un EMF sinusoidal, luego las puntas de los polos tienen una forma de tal manera que la curva de distribución de inducción estar cerca de sinusoidal. Este Se facilita con los biseles de las puntas del polo del rotor. [2] .
La Principio de operación de un motor síncrono. se basa en la interacción del campo magnético giratorio del estator y el campo magnético constante del rotor La Concepto del campo magnético giratorio. del estator de un motor síncrono es el mismo que el de un trifásico Motor de inducción .
El principio de funcionamiento de un motor síncrono se basa en la interacción de la campo magnético giratoriodel estator y el campo magnético constante del rotor.
El campo magnético del rotor, interactuando con la corriente alterna síncrona de los devanados del estator, según el amperios Ley, crea esfuerzo de torsión, forzando el rotor para girar ( más ).
Imanes permanentes ubicados en el rotor del pmsm Crea un campo magnético constante A una velocidad síncrona de rotación del rotor con el campo del estator, los polos del rotor se enclavan con el campo magnético giratorio del estator. En este sentido, el PMSM no puedo comenzar en sí mismo cuando está conectado directamente a la trifásica Red actual (Actual Frecuencia en la red eléctrica 50Hz).
Un motor síncrono de imán permanente requiere un sistema de control, por ejemplo, un unidad de frecuencia variableo un servo unidad. Hay una gran cantidad de técnicas de control implementadas Control Systems. La elección del método de control óptimo depende principalmente de la tarea que se coloca frente a la unidad eléctrica Los métodos principales para controlar un motor síncrono de imán permanente se muestran en la tabla abajo.
| control | ventajas | desventajas | |||
|---|---|---|---|---|---|
| escalar | Esquema de control simple | El control no es óptimo, no es adecuado para tareas Donde La carga variable, la pérdida de control es posible. | |||
| Con sensor de posición | Configuración suave y precisa de la posición del rotor y la velocidad de rotación del motor, gran rango de control | Requiere sensor de posición del rotor y potente microcontrolador Dentro del sistema de control. | |||
| Sin Sensor de posición | Sin sensor de posición de rotor Requerido. Configuración suave y precisa de la posición del rotor y la velocidad de rotación del motor, un gran rango de control, pero menos que con sensor de posición | Sin sensor Control orientado al campo sobre rango de velocidad completa es posible solo para pmsm Con el rotor de polos salientes, se requiere un poderoso sistema de control. | |||
| Control de torque directo | Circuito de control simple, buen rendimiento dinámico, amplio rango de control, sin sensor de posición de rotor requerido | Torque alto y ondulación actual | |||
| bucle abierto | Esquema de control simple | El control no es óptimo, no es adecuado para tareas Donde La carga variable, la pérdida de control es posible. | |||
| Con sensor de posición (Hall Sensores) | Esquema de control simple | Sensores de Hall Requerido. Hay torque ondulaciones. Está destinado a control de PMSM con la espalda trapezoidal EMF, cuando controlador pmsm Con la espalda sinusoidal EMF, el par promedio es más bajo por 5%. | |||
| Sin sensor | Sistema de control más potente requerido | No es adecuado para baja velocidad Operación. Hay torque ondulaciones. Está destinado a control de PMSM con la espalda trapezoidal EMF, cuando controlador pmsm Con la espalda sinusoidal EMF, el par promedio es más bajo por 5%. | |||
A Solucionar las tareas simples se usa generalmente el control trapezoidal con sensores de pasillo (para Ejemplo, computadora Fans). A Resuelva los problemas que requieren el máximo rendimiento de la unidad eléctrica, orientado hacia el campo El control suele ser seleccionado.
Uno de los métodos de control más simples de un motor sincrónico de imán permanente es - Trapezoidal Control. El control trapezoidal se utiliza para controlar el PMSM con la espalda trapezoidal EMF. Al mismo tiempo, este método también le permite controlar el PMSM con un EMF de espalda sinusoidal, pero luego el par promedio de la unidad eléctrica será menor en un 5%, y las ondas de torque serán 14% del máximo valor. Hay un control trapezoidal sin retroalimentación y con retroalimentación por el rotor Posición.
La Control de bucle abierto (sin Feedback) no es óptimo y puede llevar a la liberación del PMSM PMSM Fuera del sincronismo, es decir, a la pérdida de la capacidad de control.
como un sensor de posición de rotor para trifásico Control trapezoidal, tres sensores de pasillos integrados en un motor eléctrico se usan comúnmente, lo que permite determinar el ángulo con una precisión de ± 30 grados. Con este control, el vector de corriente del estator solo toma seis posiciones para un período eléctrico, como resultado de lo cual hay un par de ondulación en la salida

Orientado al campo Control (FOC) le permite controlar suavemente, con precisión e independientemente la velocidad y esfuerzo de torsiónde a sin escobillas Motor. Para El funcionamiento del algoritmo de control orientado al campo, es necesario conocer la posición del rotor de los sin escobillas Motor.

Desde la década de 1970 sin sensor Métodos de control de vectores para sin escobillas C.A motoresComenzó a ser desarrollado, gracias al rápido desarrollo de microprocesadores. El primero sin sensor Los métodos para estimar el ángulo se basaron en la propiedad del motor eléctrico para generar la espalda EMF Durante Rotación. La EMF de la espalda del motor contiene información sobre la posición del rotor, por lo tanto, al calcular el valor del EMF trasero en el sistema de coordenadas estacionario, puede calcular la posición del rotor pero cuando El rotor no está girando, la espalda EMF está ausente, y a baja velocidad, el EMF posterior tiene una amplitud pequeña, lo que es difícil de distinguir del ruido, por lo tanto, este método no es adecuado para determinar la posición del rotor de motor a baja velocidad. .

en la actualidad, sin sensor orientado al campo Control de PMSM En el rango de velocidad completo solo es posible para motores con polo saliente rotor.
Para Consultas sobre nuestros productos o su lista de precios, por favor, déjanos a nosotros y estaremos en contacto dentro de las 24 horas.





 Llama a :
Llama a :
Teléfono : +8613860661520
 Envíanos un correo electrónico :
Envíanos un correo electrónico :
Correo electrónico : ivy@tech-zy.com
 Habla a :
Habla a :
Floor 16 Building#3, No.136. Kuiqi Road, Mawei District, Fuzhou City, Fujian Province, China
© Derechos de autor: 2026 Fujian ZY Electric & Machinery Technology Co.,Ltd Reservados todos los derechos.

IPv6 Red soportada






